TRIPS
The rapid accumulation of indoor positioning data is increasingly booming the interest in indoor mobility analyses. As a fundamental analysis, it is highly relevant to translate raw indoor positioning data into mobility semantics that describe what, where and when in a more concise and semantics-oriented way.
However, such a translation is challenging in several aspects:
- The translation involves the data from multi-sources, including the indoor positioning data, the indoor space information and the relevant indoor contexts. It is a laborious task to set up those data sources for a specific data analysis.
- The translation relies heavily on the quality of the raw indoor positioning data that, however, is uncertain and discrete in nature due to the limitations of indoor positioning. Considerable efforts are needed to improve the data quality before the proper mobility semantics can be determined from the data.
- The translation result needs to be assessed properly. It is useful to compare the resultant mobility semantics to the corresponding raw positioning records. However, such a comparison is difficult due to the large gap between these two kinds of representations.
To address these challenges, we design a system TRIPS that Translates Raw Indoor Positioning data into mobility Semantics. The system streamlines the entire translation process by three functional components.
- The Configurator provides a standard but concise means to configure multiple input sources, including raw indoor positioning data, indoor space information and relevant contexts.
- The Translator incorporates a translator that is able to clean raw indoor positioning data and translate the data into reliable mobility semantics without manual interventions.
- The Viewer offers a suite of flexible interactions to visually trace the input, output and intermediate data involved in the translation, making it intuitive to assess the translation result.
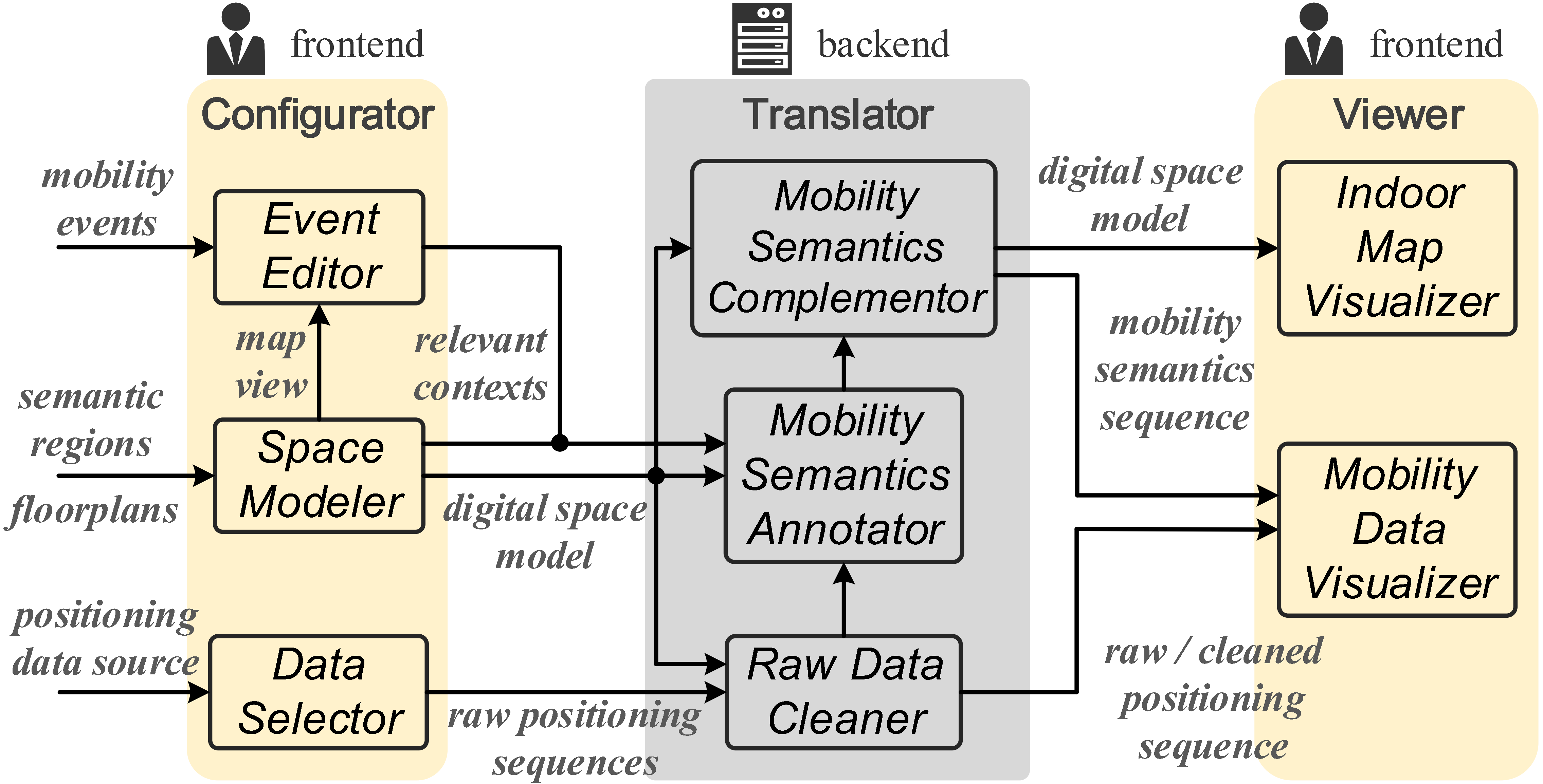
System Architecture
If you feel our project is useful to your research or development, please cite our papers:
- TRIPS: A System for Translating Raw Indoor Positioning Data into Visual Mobility Semantics. Huan Li, Hua Lu, Feichao Shi, Gang Chen, Ke Chen, and Lidan Shou. Proceedings of the 44th International Conference on Very Large Data Bases (VLDB), pp. 1918-1921, 2018.